- 23/Nov/2025 - The recordings of the ICCV'25 R6D Workshop with BOP winner presentation and result analysis are online.
- 16/Nov/2025 - The BOP Challenge 2025 Awards are online.
- 19/Aug/2025 - All object-onboarding sequences for model-free tasks (including new sequences for HOT3D and HANDAL) are now available (search for "onboarding" links).
- 22/Jun/2025 - The BOP 2025 early-bird awards have been announced at the Workshop on Perception for Industrial Robotics Automation at CVPR 2025.
- 11/Jun/2025 - Our BOP Challenge 2024 report has received the Best Paper Award at the Workshop on Computer Vision for Mixed Reality at CVPR 2025.
- 15/May/2025 - The ICCV 2025 Workshop on "Recovering 6D Object Pose" will take place in Honolulu, Hawai'i. .
- 13/Jan/2025 - BOP Challenge 2025 has been opened, together with the associated OpenCV Perception Challenge for Bin-picking with $60,000 in prizes!
- 10/Jan/2025 - Winners of the BOP Challenge 2024 have been announced (results, award certificates). Congratulations!
- 29/Sep/2024 - We are hosting the 9th Workshop on Recovering 6D Object Pose at ECCV 2024.
- 11/Sep/2024 - Submission deadline for the BOP Challenge 2024 is extended to November 29, 2024.
- 29/May/2024 - BOP Challenge 2024 has been opened!
- 18/Apr/2024 - The BOP datasets are now hosted on BOP HuggingFace Hub to prevent bandwidth overload and BOP website crashes.
- 04/Apr/2024 - BOP Challenge 2023 report has been accepted to the Workshop on Computer Vision for Mixed Reality at CVPR 2024.
- 03/Oct/2023 - Winners of the BOP Challenge 2023 have been announced at the R6D workshop at ICCV 2023 (results, recording). Congratulations!
- 26/Sep/2023 - The submission deadline for BOP Challenge 2023 is extended to September 28, 9:00AM UTC.
- 07/Jun/2023 - BOP Challenge 2023 has been opened!
- 26/May/2023 - Raw results from all public submissions are now available for download (example). This allows anyone to analyze individual methods in more detail.
- 05/Apr/2023 - BOP Challenge 2022 report has been accepted to the Workshop on Computer Vision for Mixed Reality at CVPR 2023.
- 23/Oct/2022 - Winners of the BOP Challenge 2022 have been announced at the R6D workshop at ECCV 2022 (results, recording: part 1, part 2). Congratulations!
- 20/Sep/2022 - Reality Labs at Meta and Niantic donated $4000 in total for BOP Challenge 2022 award money.
- 24/Jul/2022 - Call for papers: R6D workshop at ECCV 2022, submission deadline: August 8.
- 01/May/2022 - BOP Challenge 2022 has been opened!
- 11/Sep/2021 - HOPE, a new dataset from NVIDIA for pose estimation of household objects, has been released.
Join the BOP Google group to stay up to date.
Mission
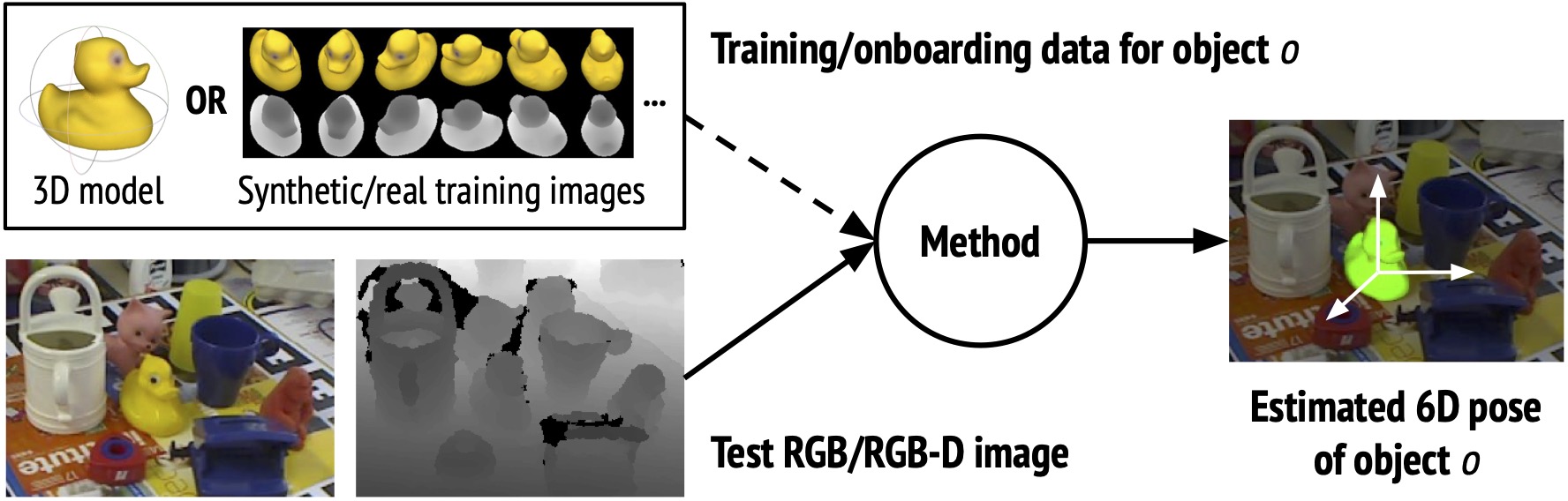
The goal of BOP is to capture the state of the art in 6DoF object pose estimation and related tasks such as 2D object detection and segmentation. An accurate, fast, robust, scalable and easy-to-train method that solves this task will have a big impact in application fields such as robotics or augmented reality.
Publications
-
BOP Challenge 2024 on Model-Based and Model-Free 6D Object Pose Estimation
[PDF,
SLIDES,
VIDEO,
POSTER,
BIB]
Van Nguyen Nguyen, Stephen Tyree, Andrew Guo, Médéric Fourmy, Anas Gouda, Taeyeop Lee, Sungphill Moon, Hyeontae Son, Lukas Ranftl, Jonathan Tremblay, Eric Brachmann, Bertram Drost, Vincent Lepetit, Carsten Rother, Stan Birchfield, Jiří Matas, Yann Labbé, Martin Sundermeyer, Tomáš Hodaň
CVPRW 2025 (CV4MR), Nashville
-
BOP Challenge 2023 on Detection, Segmentation and Pose Estimation of Seen and Unseen Rigid Objects
[PDF,
SLIDES,
VIDEO,
BIB]
Tomáš Hodaň, Martin Sundermeyer, Yann Labbé, Van Nguyen Nguyen, Gu Wang, Eric Brachmann, Bertram Drost, Vincent Lepetit, Carsten Rother, Jiří Matas
CVPRW 2024 (CV4MR), Seattle
-
BOP Challenge 2022 on Detection, Segmentation and Pose Estimation of Specific Rigid Objects
[PDF,
SLIDES,
VIDEO 1, VIDEO 2,
BIB]
Martin Sundermeyer, Tomáš Hodaň, Yann Labbé, Gu Wang, Eric Brachmann, Bertram Drost, Carsten Rother, Jiří Matas
CVPRW 2023 (CV4MR), Vancouver
-
BOP Challenge 2020 on 6D Object Localization
[PDF,
SLIDES,
BIB]
Tomáš Hodaň, Martin Sundermeyer, Bertram Drost, Yann Labbé, Eric Brachmann, Frank Michel, Carsten Rother, Jiří Matas
ECCVW 2020 (R6D), Glasgow
-
BOP: Benchmark for 6D Object Pose Estimation
[PDF,
SLIDES,
POSTER,
BIB]
Tomáš Hodaň, Frank Michel, Eric Brachmann, Wadim Kehl, Anders Glent Buch, Dirk Kraft, Bertram Drost, Joel Vidal, Stephan Ihrke, Xenophon Zabulis, Caner Sahin, Fabian Manhardt, Federico Tombari, Tae-Kyun Kim, Jiří Matas, Carsten Rother
ECCV 2018, Munich
Workshops on Recovering 6D Object Pose (R6D)
The BOP benchmark is organized together with the R6D workshops held at international conferences (ECCV and ICCV). The workshops feature invited talks by experts in the field, oral/poster presentations of accepted workshop papers, discussion on open problems, and are attended by people working on relevant topics in academia and industry.
Organized R6D workshops: 9th edition (ECCV'24), 8th edition (ICCV'23), 7th edition (ECCV'22), 6th edition (ECCV'20), 5th edition (ICCV'19), 4th edition (ECCV'18), 3rd edition (ICCV'17), 2nd edition (ECCV'16), 1st edition (ICCV'15).
BOP Toolkit
Python code for reading the BOP dataset format, evaluation, visualization, etc. are provided in the BOP Toolkit.
The online evaluation system has been developed by Tomáš Hodaň and Antonín Melenovský and is currently maintained and further developed by Médéric Fourmy.